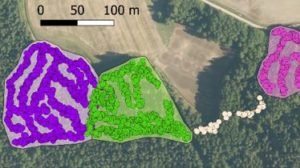
Tutkimuksen tavoitteena oli luoda automaattinen menetelmä hakkuualueen rajaukseen hakkuukoneen sijaintitietoon perustuen. Kehitettyä menetelmää voidaan jatkossa hyödyntää operatiivisessa toiminnassa kuviorajojen ajantasaistuksessa.
Tuloskalvosarjaan liittyy neljä liitettä:
- LIITE 1. Algoritmi I – Kuvioiden ja niille johtavien ajourien erottelu
- LIITE 2. Algoritmi II – Peruskuvioiden muodostus
- LIITE 3. Algoritmi III – Vierekkäisten kuvioiden käsittely
- LIITE 4. Viimeistely – Ajourien huomiointi puutiedoissa ja lopullinen kuviointi
Publication in English: Tuloskalvosarja 7b/2018: Automated stand delineation based on harvester location data