
Metsätehon kehittämä automaattinen ajouraverkostojen laskentamenetelmä on julkaistu vertaisarvioidussa Forests-lehdessä. Artikkelissa kuvataan menetelmän osat yksityiskohtaisesti ja verrataan laskennallisia ajouraverkostoja maastossa toteutuneisiin verkostoihin.
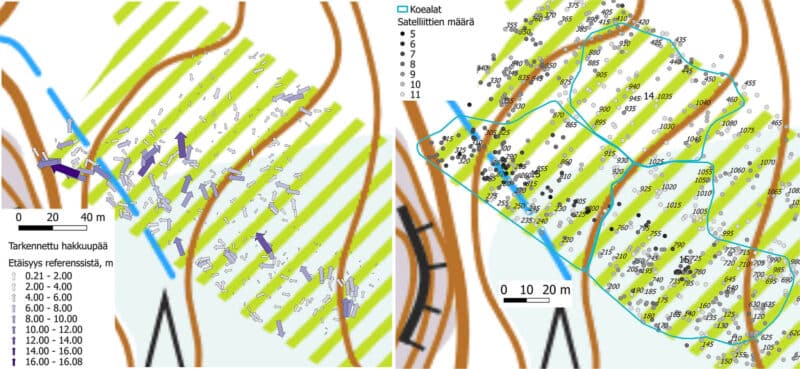
Hakkuupään sijaintitiedon tarkkuus operatiivisilla korjuukohteilla
Hakkuupään sijaintitietoa voidaan käyttää mm. metsävaratietojen tarkempaan tuottamiseen ja päivittämiseen, hakkuukuvioiden ja erityiskohteiden rajaamiseen sekä poistettujen runkojen määrän ja sijaintien todentamiseen suojavyöhykkeiden läheisyydestä.
Hakkuupään sijaintitiedon tarkkuus
Metsätehon tuloskalvosarja 1/2022: Hakkuupään sijaintitiedon tarkkuus (pdf 2,1 Mt)
Metsätehon automaattinen kuviointimenetelmä on julkaistu
Metsätehon kehittämä automaattinen menetelmä, joka tuottaa toimenpidekuviot hakkuukoneen sijaintitiedoista, on julkaistu vertaisarvioidussa Remote Sensing -lehdessä.
Hakkuukonetiedosta simuloidut puun sijainnit kaukokartoituksen opetusaineistona
Tutkimuksessa selvitettiin Arbonaut Oy:n ja Metsäteho Oy:n yhteistyönä simuloimalla parannetun hakkuukoneen sijaintitiedon hyödyntämistä kaukokartoitukseen perustuvan metsäinventoinnin opetusaineistona. Metsätehon tuloskalvosarja 5/2019: Hakkuukonetiedosta simuloidut puun sijainnit kaukokartoituksen opetusaineistona Julkaisuun liittyvä tiedote Metsätehon […]

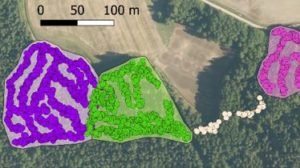
Ajourien automaattinen tuottaminen ja ajouratunnusten määrittäminen hakkuukoneen sijaintitietoon perustuen
Tutkimuksen tavoitteena oli muodostaa hakkuualueen ajourat automaattisesti hakkuukoneen puun kaatohetken sijaintitietoon perustuen. Automaattisesti muodostettua ajouratietoa voidaan hyödyntää kuljettajan operatiivisessa työssä toimenpidekuviolla tehdyn hakkuutyön laadun omavalvonnassa, kuin myös yleisemmin puunkorjuun laadun […]
Ajouraverkosto ja ajouratunnukset voidaan tuottaa automaattisesti hakkuukonetietoihin perustuen
Tutkimuksessa kehitettiin automaattinen laskentamenetelmä, joka tuottaa toimenpidekuviolle ajourat perustuen hakkuukoneen sijaintitietoon puun kaatohetkellä.
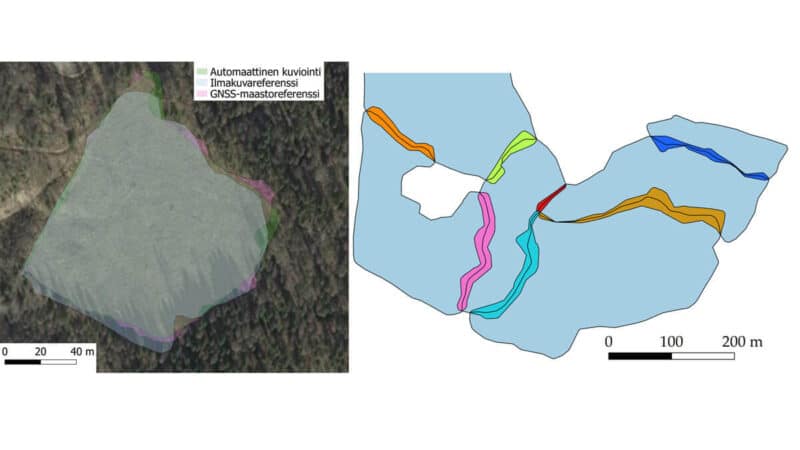
Automaattinen toimenpidekuvion rajojen muodostus hakkuukoneen sijaintitietoon perustuen
Tutkimuksen tavoitteena oli luoda automaattinen menetelmä hakkuualueen rajaukseen hakkuukoneen sijaintitietoon perustuen. Kehitettyä menetelmää voidaan jatkossa hyödyntää operatiivisessa toiminnassa kuviorajojen ajantasaistuksessa.
Hakkuualueen rajan muodostus hakkuukoneen sijaintitietoon perustuen
Tutkimuksen tavoitteena oli luoda menetelmä hakkuualueen rajaukseen hakkuukoneen sijaintitietoon perustuen. Kehitetty menetelmä perustuu Delaunay-kolmiointiin, puskurivyöhykkeen muodostukseen ja tiettyihin parametriarvoihin, joiden avulla muodostetaan hakkuualueiden toteutuneet rajat.